Advanced low-cost solution offers high performance, power, and ultra-compact size for mass deployment
by Michael Wittmann, Senior VP of Marketing
In our previous blog, we discussed multiple sensor modalities, including light detection and ranging (LiDAR), and their relative merits for automotive applications. LiDAR is an increasingly important enabling technology for modern vehicles as automakers seek to improve safety and driving automation features.
Automotive LiDAR was initially targeted at fully autonomous vehicles, however, due to the superior resolution, range, and depth perception capabilities when compared to vision and radar systems, LiDAR offers complementary benefits for advanced driver assistance systems (ADAS) for mass-market vehicles.

LiDAR systems create a 3D view of their environment by using a laser source to illuminate a scene with light in the infrared spectrum which is scanned in the horizontal and vertical axes. The resulting reflections are detected by receiving photodetectors creating a 3D image called a “point cloud”.
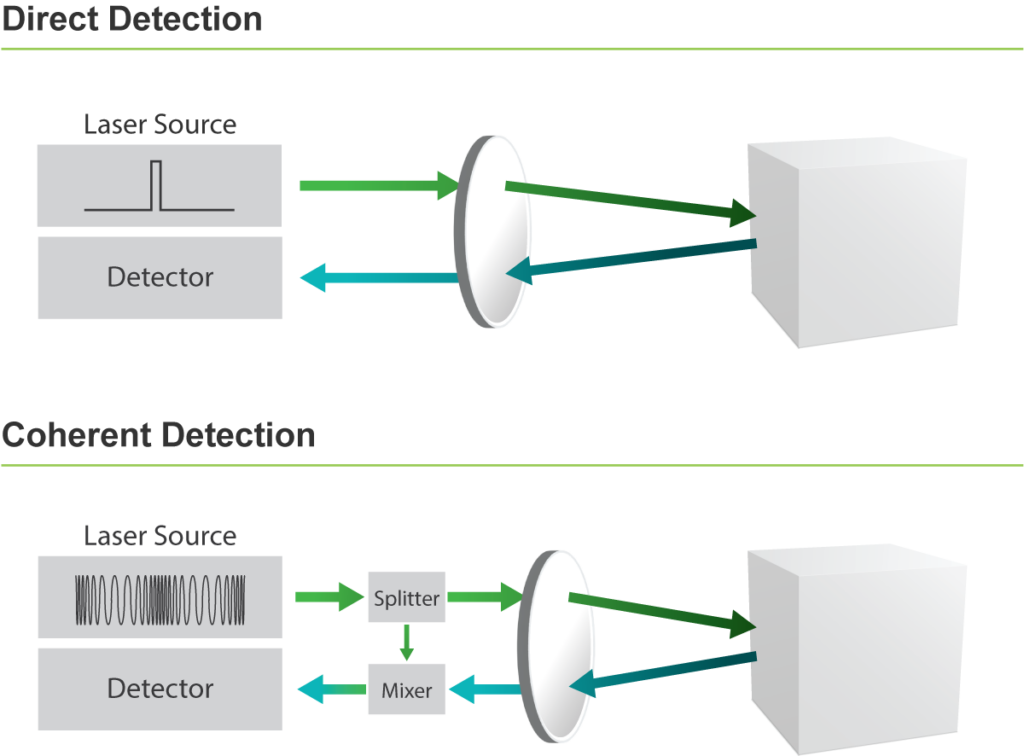
There are two key approaches to LiDAR sensing: direct detection and coherent detection. Direct detection measures the time it takes for individual emitted light pulses (“Time of Flight” or ToF) to return to the photodetector, and the distance to the object can then be calculated from that measurement. In coherent detection, which takes its root from radio communications, a source signal is modulated onto an emitted coherent laser wave, then detected at the receiver by comparing the phase and frequency of the received signal to the original as a reference.
ToF-based LiDAR systems typically operate in near-infrared (NIR) at wavelengths between 850-950nm where laser sources and silicon-based detectors are readily available from existing datacom and consumer applications. Coherent LiDAR systems typically operate at short-wave infrared (SWIR) wavelengths between 1300-1600nm enabling long-range detection, and where components are well suited to silicon photonic integration and are available from telecommunications applications. Some ToF applications are also now leveraging SWIR due to its inherent benefits.
One widely employed implementation of coherent detection, known as frequency-modulated continuous wave (FMCW) LiDAR, has recently gained commercial traction in automotive applications for a variety of reasons, including:
- better immunity from interference from other light sources (including sunlight and other LiDARs) compared to ToF
- several orders of magnitude higher inherent sensitivity compared to ToF (enabling longer range, or lower optical transmit power for given performance)
- better eye safety of SWIR wavelengths typically used in coherent systems compared to NIR (safely enabling higher optical power where needed)
- ease of integration of key LiDAR components into silicon photonic integrated circuits, allowing smaller form factors and leverage of the economies of scale that silicon brings
- the ability to determine the per-point velocity of objects by measuring the Doppler shift of the received light, (enabling rapid and accurate positioning, classification, and path prediction of objects).
This approach has been widely documented in academic and commercial literature. Though coherent detection does require more complex processing, innovative digital signal processing techniques can address this.
The benefits of coherent detection are well understood, and almost every communication system that has ever existed has migrated towards coherent-based approaches, though most start from simpler, cheaper, and easier to implement forms. Examples include radio (AM -> FM), cellular (analog -> digital -> 3rd-5th generations with ever more complex modulation), optical fiber and RADAR. The latter, for example, started as pulsed ToF for many applications, including automotive, but ultimately moved to a coherent approach to improve performance. Similarly, indie believes that coherent LiDAR detection best enables the technical and commercial needs for automotive solutions for the future.
Reducing Power, Complexity and Cost of High-performance Coherent LiDAR
The optical front-end and laser scanning mechanism are essential elements of the overall LiDAR system performance, power, and cost, and will be discussed in more detail in a future blog. In the sections below, we will focus on the digital processing requirements for a LiDAR system, which is also indie’s commercial focus, for the optical front-end’s transmit and receive signal chains.
To date, addressing the complex and compute-intensive demands of coherent LiDAR systems has been achieved using very high-end field programmable gate arrays (FPGAs). FPGAs are ideal for prototyping and offer high levels of flexibility and versatility – especially beneficial for nascent applications. But FPGAs are expensive, power-hungry, and require additional complex PCBs and discrete components that add to the cost, form factor size, and thermal and power consumption constraints. High-end commercial FPGAs have extremely high price points of hundreds to thousands of dollars, with corresponding power dissipation of tens or in extreme cases hundreds of Watts (this is before the optical front-end is even considered). This makes any migration to mass-market LiDAR impractical where automakers are asking suppliers to target series production at a sub-$500 price point and sub-30W power dissipation rate for long-range LiDAR. Short-range automotive LiDAR targets are even more aggressive.
However, an application-specific integrated circuit (ASIC), which is designed from the outset for the end-application, has the potential to deliver huge power efficiencies, significantly smaller footprints, and far lower cost than an FPGA. Although complex ASICs, as in the case of coherent LiDAR, typically require several years of development and many tens of millions of dollars of up-front investment, the trade-off is an optimized digital processing solution that enables true deployment.
indie’s iND83301, Surya™ LiDAR SoC, is the world’s first merchant, coherent detection LiDAR ASIC, allowing designers to implement a highly integrated, high-performance software-defined data acquisition and signal processing system, eliminating the need for sub-optimal FPGA-based implementation. iND83301 integrates all the necessary multi-channel high-speed analog-to-digital converters, programmable hardware and software digital signal processing together with the system control interfaces needed for a LiDAR system. Surya enables the complete processing chain from analog data capture all the way to point-cloud output over ethernet. The device’s transmitter features an arbitrary waveform generator and includes a waveform storage buffer and high-speed digital-to-analog converter, whose overall timing can be synchronized to both the receive chain and opto-mechanical LiDAR subsystems such as external beam scanners. And with the ability to load all firmware securely from an off-chip Flash memory device, iND83301 retains the field upgradeability of legacy FPGA solutions to support evolving processing and perception algorithms, but without the power, footprint, and cost disadvantages.
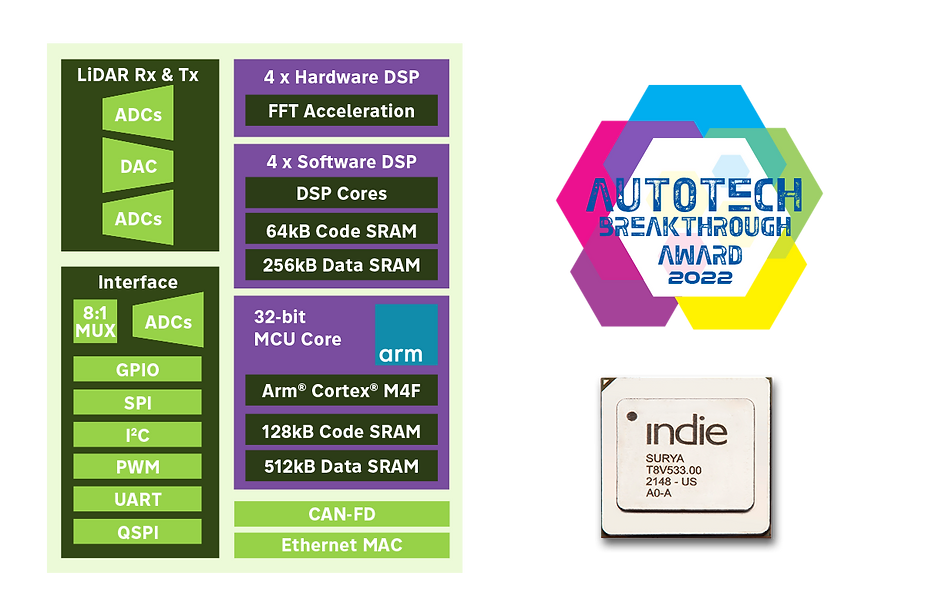
The iND83301 is industry-recognized, having been awarded the 2022 ‘LiDAR Solution of the Year’ by AutoTech Breakthrough Awards and Silver for ‘LiDAR Development of the Year Award’ at the 2022 AutoSens Awards in Brussels.
Looking to the Future
According to recent data from S&P Global, the global automotive LiDAR system ECU value is projected to grow 10x from $600 million in 2023 to $6 billion by 2033 – a CAGR of 26%. As global automakers specify new ADAS safety requirements such as high-resolution object detection for both long- and short-range applications, and improved perception capabilities leveraging velocity information, coherent detection-based LiDAR will become the de facto technical and commercial solution. indie’s iND83301 Surya SoC, and subsequent roadmap devices will allow vehicle manufacturers to reap all the advantages of coherent LiDAR, without compromising form factor, cost targets and power and thermal overheads of previous approaches.
Stay tuned for an upcoming blog, where we will take a more intensive look into the optical front-end and laser scanning mechanism, which are key elements of the overall LiDAR system performance.