by Donald McClymont, CEO
A Social Imperative
The World Health Organization (WHO) has widely reported that over 1.3 million people die tragically each year due to road traffic accidents globally, and many millions more are injured. Sadly, a large majority of these deaths are avoidable. Multiple national and regional initiatives have been launched in recent decades to address and reduce road-related tragedies. Of these initiatives, one of the most notable is the Swedish government’s passing of “Vision Zero,” a road traffic safety bill founded in 1997. This bill set into motion a global mind shift on the ethical concept “It can never be ethically acceptable that people are killed or seriously injured when moving within the road transport system.”
While governments and the automotive industry have made some progress, this evolution is not occurring fast enough. Recently, the WHO redoubled its efforts to galvanize stakeholders (governments, private and civil sectors, academia, United Nations agencies, and investors) with its “Global Plan for the Decade of Action.” The Global Plan offers a framework of aggressive actions to halve road deaths and injuries by 2030. A vital component of this plan places a strong focus on vehicle safety, with the goal to accelerate the deployment of new technology and advanced safety features into vehicles by automotive manufacturers. This initiative is underpinned by increased safety regulations and improved consumer education regarding vehicle safety capabilities through initiatives like the Global New Car Assessment Programme (Global NCAP).
As these global initiatives gather momentum and drive cross-stakeholder commitment to action, the ultimate vision of the uncrashable car will become tangible. Today, we are in the early stages of progression towards level 4 and level 5 driving automation. We are also beginning to see pioneering legal reform proposals recognizing the concept of ‘users in charge,’ such as the Automated Vehicles Act recently introduced in the United Kingdom. While this is highly encouraging, the automotive industry needs to deploy robust, reliable, and cost-effective sensing technologies to realize this vision fully.

Understanding Sensing and Vehicle Architecture
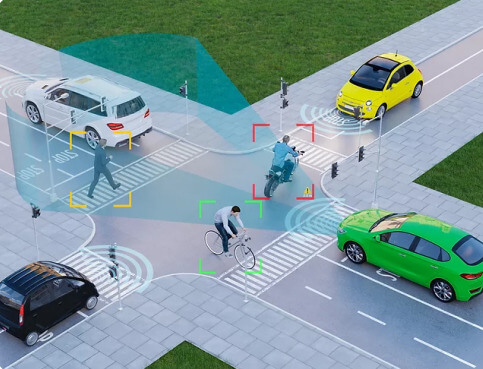
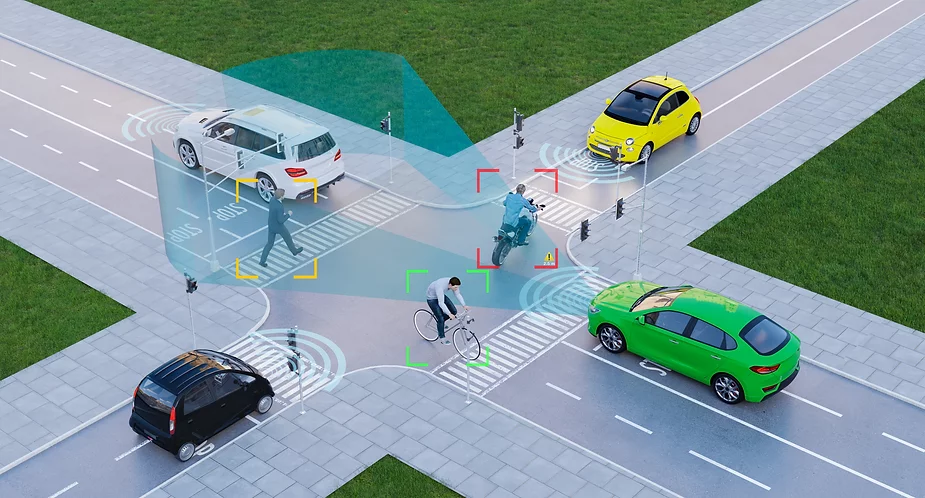
Driver safety and automation are enabled by Advanced Driver Assistance Systems (ADAS), a key megatrend that Donald McClymont, indie co-founder and chief executive officer, touched on in our previous blog “Pioneering a New Path Forward in the Autotech Revolution.” ADAS applications rely on various sensor modalities to gather data about the vehicle’s exterior and interior environment. In the context of vehicle motion dynamics, this data needs to be processed to enable timely decision-making and ultimately trigger automated safety response actions such as braking, steering, or driver alerts. Sensing modalities such as ultrasonic, radar, LiDAR, and computer vision are now critical aspects of a vehicle’s ‘sensing’ capability, each bringing benefits to enable environmental awareness for the vehicle.
These sensor modalities must be integrated into the vehicle’s overall electrical and electronic (E/E) architecture. There are multiple trade-offs to consider when evaluating E/E architecture and how much processing and decision-making intelligence (i.e., “think” and “act”) is added to the sensing edge versus centralized processing. There has been much industry analysis, commentary, and at times, a lack of agreement about the ‘right’ deployment approach of distributed-, domain-, zonal- and centralized-compute architecture in the age of the software-defined vehicle.
This lack of standardization is not surprising, given each automotive OEM has a unique view of the E/E platform scalability priorities and legacy constraints that need to be considered. This is especially true in the similar context of powertrain electrification and increasing deployment of ADAS systems driven by regulation. But while slightly different in final implementation, the high degrees of processing integration from domain- to centralized-compute architecture have a collective goal of reducing software complexity, manageability, and vehicle wiring complexity.
While the debate over distributed versus centralized E/E architectural disruption continues, indie believes strongly that distributed intelligence will play a fundamental role in the journey to creating the uncrashable car. Such distributed intelligence, based on integrating some degree of processing capability into the vehicle sensing modalities, offers significant flexibility and will allow us to address the challenges noted above by deploying highly scalable automated driver safety solutions, regardless of the E/E architecture.
In our next blog, we will look at various sensor modalities and processing requirements that the uncrashable car will need.